

NEC’s new AI technology for robotics & RAN optimization designed to improve performance
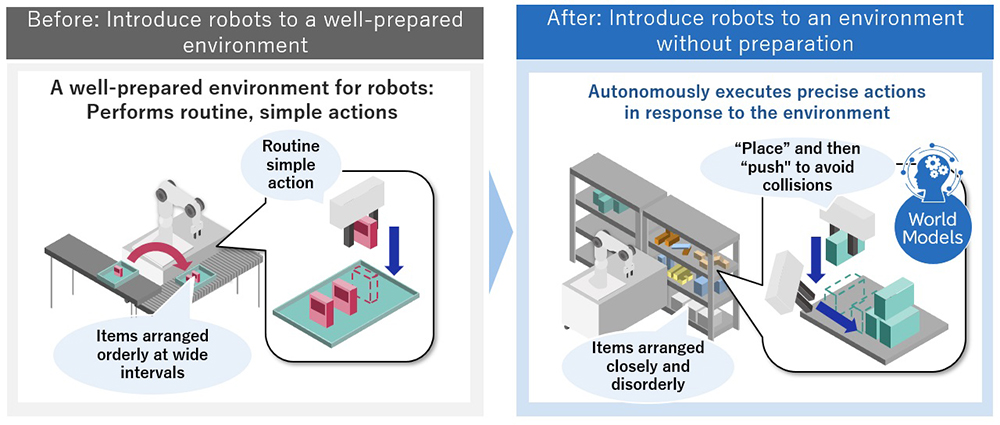
NEC Corporation has developed AI technology for robotics that enables precise handling operations on unorganized and disorderly placed items. By predicting both the areas hidden by obstacles and the results of a robot’s actions, this technology makes it possible for robots to perform tasks that were previously performed manually, thereby contributing to the improvement of productivity and work-styles.
NEC has developed AI technology for robotics that consists of two technologies based on “World Models“:
“Spatiotemporal Prediction,” in which a robot precisely predicts the work environment and the results of its own actions from camera data, and
“Robot Motion Generation,” which automatically generates optimal and precise actions based on these predictions. According to NEC research, this is the world’s first technology of its kind to be applied to robot operations.
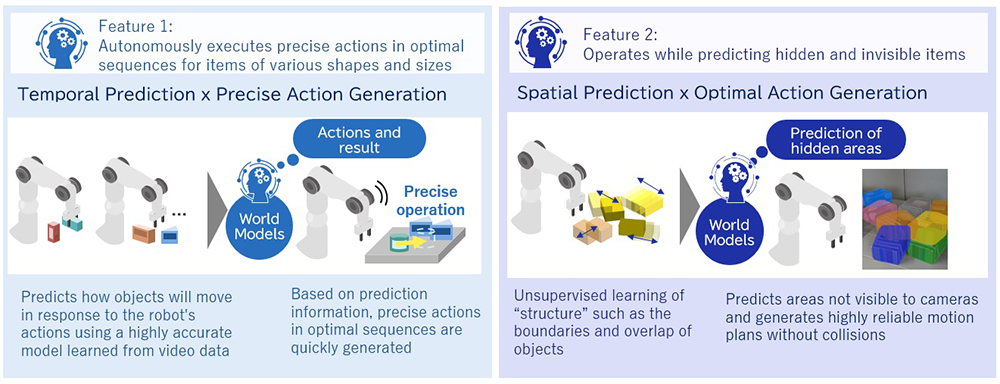
1. Autonomously executes precise actions in optimal sequences for items of various shapes and sizes:
The handling of objects performed manually at a work site are executed by a combination of various actions. For example, in packing items, people can instantly execute a combination of precise actions such as “placing and then pushing items” without hitting other objects or obstacles. In robot control that uses conventional technologies, however, actions such as “push” and “pull” are more difficult to execute with high precision than actions such as “pick up” and “place.” This is because slight differences in actions or shapes significantly influence how objects move in response to actions. In addition, as the number and types of actions to be considered increases, the combination and sequence of actions becomes more complex, which makes real-time planning a challenge.
This technology uses World Models to accurately predict the results of robot actions on objects of various shapes from video camera data, enabling robots to execute precise actions such as “push” and “pull.” Moreover, robots can autonomously and instantly execute combinations of multiple actions such as “place and push” and “pull and pick up” by generating the appropriate action sequence at real-time speed depending on the work environment.
2. Operates while predicting hidden and invisible items:
In a work environment where multiple items are closely arranged or disorderly piled up, people naturally predict the hidden areas and act accordingly, such as picking up items while avoiding interference with hidden objects. However, conventional recognition technology for robots has been difficult for practical use because it requires the preparation and learning of a large amount of teaching data showing the state of hidden objects in order to predict the hidden areas.
This new technology enables unsupervised learning that does not require labeling through the application of World Models and is able to efficiently learn prediction models of hidden object shapes. This enables robots to accurately predict a work environment from camera data and automatically generate optimal actions that do not collide with other objects or obstacles.
NEC will test this technology in logistics warehouses and other sites where much of the work is done manually by the end of 2024. By promoting social implementation of this technology in various industries with significant need for automation, NEC will contribute to improved productivity and work style reform.
………………………………………………………………………………………………………….
Separately, NEC has developed a RAN autonomous optimization technology that dynamically controls 5G Radio Access Networks (RAN) according to the status of each user terminal, dramatically improving the productivity of applications, such as the remote control of robots and vehicles. NEC will incorporate the technology into RAN Intelligent Controllers (RIC) and conduct demonstration tests using this technology by March 2025.
There is growing momentum to promote digital transformation (DX) by utilizing the latest technologies such as 5G, Artificial Intelligence (AI), and the Internet of Things (IoT) with the aim of resolving labor shortages and improving productivity.
When using these technologies for remote control of robots and vehicles, two-way communication consisting of status monitoring and control instructions for each robot/vehicle must be completed within a certain period of time.
However, if the communication latency exceeds the requirement, the operation is repeatedly suspended for safety reasons, resulting in a decrease in the operation rate and productivity. The communication delays, such as retransmission delays due to poor radio quality and queuing delays (*) due to congestion on the radio links, have been a barrier to the introduction of remote control systems.
Currently, stable communications environments have been achieved by installing high performance network equipment, providing sufficient frequency resources, increasing redundancy in coding and communication paths, and pre-configuration of RAN parameters according to the application. However, with these methods, it is difficult to widely support applications that are diversifying with the advancement of DX, and the time and cost required for implementation is also an issue.
About the RAN autonomous optimization technology:
The RAN autonomous optimization technology developed by NEC consists of AI that analyzes communication requirements and radio quality fluctuations on a per-user terminal basis, such as robots and vehicles, and AI that dynamically controls RAN parameters on a per-user terminal basis based on the results of that analysis. This AI learns from past operational records of robots and vehicles, and optimally controls RAN parameters such as modulation and coding scheme (target block error rate), radio resource allocation (resource block ratio), and maximum allowable delay (delay budget) while predicting the probability of exceeding communication latency requirements. Whereas in a typical 5G network, RAN parameters are fixed and set for the entire network, this technology dynamically controls them on a per-user terminal basis to improve application productivity.
Technology features are as follows.
1. Flexible support for a variety of applications
RAN parameters can be dynamically controlled according to the communication requirements of applications, enabling overall optimization even in environments where diverse applications are mixed.
2. O-RAN Alliance-compliant and easy to deploy
Since it can be mounted on RIC that are compliant with O-RAN Alliance standard specifications, it is easy to install or add to existing facilities.
3. Dramatic productivity gains are possible at industrial sites
Simulation results of applying this technology to a system that remotely controls multiple autonomous robots operating in factories or warehouses confirmed that the number of robot stoppages can be reduced by 98% or more compared to cases where this technology is not used.
NEC plans to incorporate the technology into RIC platforms compliant with the O-RAN Alliance standard specifications and conduct demonstration tests using this technology by March 2025.
NEC will exhibit this technology at MWC Barcelona 2024, the world’s largest mobile exhibition, which will be held from February 26 to February 29, 2024 at Fira Gran Via, Barcelona, Spain.
When using these technologies for remote control of robots and vehicles, two-way communication consisting of status monitoring and control instructions for each robot/vehicle must be completed within a certain period of time. However, if the communication latency exceeds the requirement, the operation is repeatedly suspended for safety reasons, resulting in a decrease in the operation rate and productivity. The communication delays, such as retransmission delays due to poor radio quality and queuing delays due to congestion on the radio links, have been a barrier to the introduction of remote control systems.
